



摘要:,,本文介绍了潜艇实时航向模型制作的全攻略,从入门到精通。内容涵盖潜艇航向模型的基本原理、制作步骤、技术要点和注意事项等方面。通过本文的学习,读者可以全面了解潜艇实时航向模型制作的全过程,掌握相关技术和方法,为潜艇航行控制和导航提供有力的支持。
潜艇实时航向模型制作是一项结合了航海技术、物理模拟与计算机编程的综合性工作,本指南旨在为初学者和进阶用户提供详尽的步骤,帮助大家完成潜艇航向模型制作的任务,掌握相关技能。
准备工作
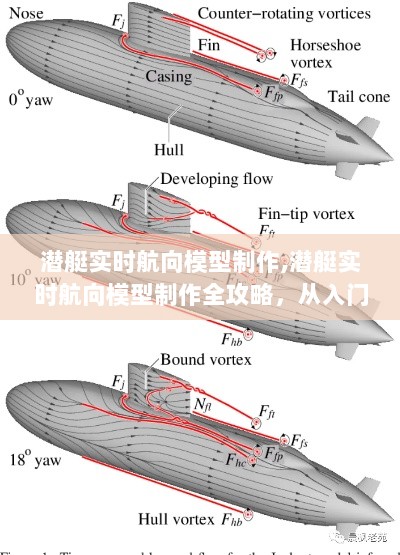
1、了解潜艇基础知识:在开始制作潜艇航向模型前,需要对潜艇的结构、工作原理及航行特性有所了解,可以通过阅读相关书籍、观看视频或参加在线课程学习。
2、准备工具与材料:准备建模软件(如MATLAB、Simulink等)、计算机、相关硬件设备及建模所需材料(如纸张、塑料板等)。
建立模型框架
1、设计模型结构:根据潜艇的实际结构,设计航向模型的框架,包括潜艇主体、推进系统、导航系统、控制系统等。
2、选择建模软件:选择适合的建模软件,如MATLAB的Simulink模块,用于模拟潜艇的航行过程。
制作航向控制系统模型
1、设计航向控制算法:根据潜艇的航行需求,设计合适的航向控制算法,如PID控制算法。
2、建立控制系统模型:在建模软件中,建立航向控制系统的模型,包括传感器、控制器、执行器等。

3、仿真测试:对控制系统模型进行仿真测试,验证其性能及稳定性。
制作推进系统模型
1、设计推进系统:根据潜艇的推进需求,设计合适的推进系统,包括推进器、传动系统等。
2、建立推进系统模型:在建模软件中,建立推进系统的模型,模拟推进系统的运行过程。
3、仿真测试与优化:对推进系统模型进行仿真测试,验证其性能并进行优化。
制作导航系统与传感器模型
1、设计导航系统:根据潜艇的航行需求,设计合适的导航系统,包括GPS、惯性导航等。
2、设计传感器:为潜艇设计必要的传感器,如深度传感器、速度传感器等。
3、建立导航与传感器模型:在建模软件中,建立导航系统和传感器的模型,模拟其在潜艇航行过程中的作用。
整合与测试
1、整合各系统模型:将航向控制系统、推进系统、导航系统与传感器等模型整合到一起,形成一个完整的潜艇航向模型。
2、进行仿真测试:对整合后的潜艇航向模型进行仿真测试,验证其性能及稳定性,确保潜艇能够按照预设的航向进行航行。
优化与调整
1、根据仿真测试结果,对潜艇航向模型进行优化与调整,提高模型的精度和性能。
2、对模型的各个参数进行调整,以适应不同的航行环境和任务需求。
实际应用与拓展
1、将优化后的潜艇航向模型应用于实际潜艇的航行控制中,提高潜艇的航行性能。
2、根据需要进一步拓展模型的功能,如添加自动避障、自动路径规划等功能。
通过本指南的学习和实践,读者应已掌握潜艇实时航向模型制作的基本技能,从准备工作到实际应用与拓展,每个步骤都详细阐述了制作过程中需要注意的事项和操作方法,希望读者能够顺利完成潜艇航向模型制作的任务,并不断提高自己的技能水平。

 京ICP备11000001号
京ICP备11000001号
还没有评论,来说两句吧...